CopterSonde
The CopterSonde is an uncrewed aerial system (UAS) developed at the Univeristy of Oklahoma for the observation of lower atmospheric conditions. Dr. Tony Segales (OU-CIWRO) is the main developer of the system, and continuous to work in the BLISS group as the engineer improving and supporting this system and expanding capaibilities generally. You can read about the detailed technical background of the CopterSonde in Tony’s AMT article and in the US Patent documentation. The CopterSonde has undergone NOAA Airworthiness tests, and is cleared to fly on NOAA projects. You can check out this story for history and information about the construction of the Coptersonde. Below, a summary information brocure about the Coptersonde and its specifications is available.
Features Designed with Meteorology in Mind
Tried and Tested
Precision Meteorological Measurements: Available on Demand
The original CopterSonde UAS was designed with the express purpose of sampling the thermodynamic and kinematic state of the lower Earth’s atmosphere, with a focus on vertical profiles in the planetary boundary layer. It provides the same information as a rawinsonde, but with much more control of its sampling location. Development began in 2016 for the NOAA funded EPIC (Environmental Profiling and Initiation of Convection) field campaign and development has largely continued through support from the National Science Foundation and the University of Oklahoma. The initial design has undergone considerable modification and the CopterSonde UAS is now capable of adaptative atmospheric sampling, real-time data processing and dissemination, longer flight times, and better data quality.
Our goal in developing the CopterSonde UAS has been to provide a sensor platform for lower atmospheric sampling that is easy to deploy, delivers reliable data, and facilitates adaptive sampling.
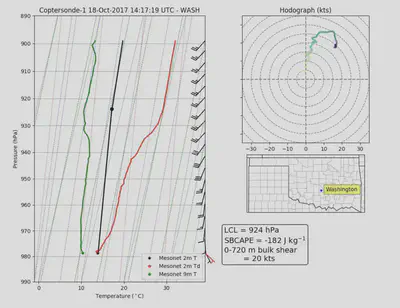
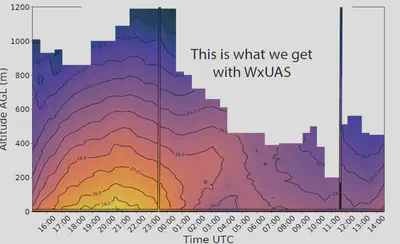
Sample Data Collection
The meteorological community has recognized the need for accurate measurements within the planetary boundary layer with sufficient spatial and temporal resolution for assimilation into weather forecast models and to improve forecasters’ situational awareness of prevailing conditions.
Key Features of the CopterSonde UAS
The current version of the autopilot code runs a set of custom functions added on top of the original ArduPilot code by our developer team. Some of the CopterSonde’s key features are:
- Smart battery management and a high wind failsafe: these functions evaluate the potential risks automatically while in flight. The CopterSonde can trigger Return-To-Launch (RTL) by itself in the case of reaching maximum battery range and/or flying under extreme wind conditions.
- Auto-generation of vertical waypoints mission: the CopterSonde is able to automatically create and execute a vertical flight wherever it is placed for take-off at the flick of a switch. This feature eliminates the need to manually create the waypoint mission through the ground station, thus mitigating mistakes from the operators and saving time in the deployment.
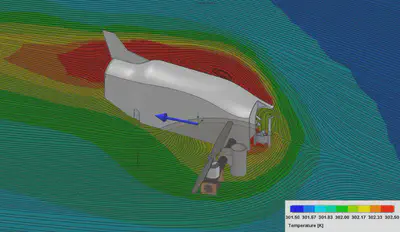
- Wind vane flight mode: a simple wind estimation algorithm was developed and implemented on the autopilot. The autopilot estimates the wind direction and adaptively turns the CopterSonde into the wind. By maintaining the CopterSonde orientation into the oncoming wind, the air being drawn across the sensors has not been disturbed by effects from the CopterSonde body. As a result, data contamination is minimized.
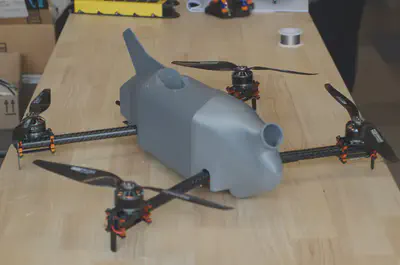
- Customizable shell and payload: the CopterSonde was designed to be a modular system, in particular the payload has its own detachable compartment capable of operating independently to facilitate the calibration and maintenance routines.
- Smart fan for sensor aspiration: the algorithm toggles the fan’s power on/off at specified heights after takeoff and before landing. This protects the delicate structure of the sensors and from dust and debris.
- Weather sensor integration: the CopterSonde is able to read a variety of weather sensors that supports I2C or UART protocols. It is currently able to read the bead thermistors distributed by International Met Systems (iMet) and HYT-271 humidity sensors distributed by Innovative Sensor Technology (IST).
- Custom sensor message for wireless streaming: the autopilot uses the Micro Air Vehicle Link (MAVLink) protocol to code the messages and stream data down to the ground station control. The sensors data can be monitored and processed in real-time while in flight.
Platform Technical Specifications
| AIRFRAME | PROPULSION SYSTEM | ||
|---|---|---|---|
| Body | Carbon fiber tube (arms) G10 fiberglass (internal structure), and aluminum (connectors and spacers) |
Brushless Electric Motor | |
| Shell | 3D printed PLA | Lifespan | 1600 hrs |
| Diagonal | 50.8 cm | kV Rating | 700 RMP/V |
| Height | 15.2 cm | Maximum Thrust | 1.23 km/rotor |
| Flight Controller | Pixhawk Cube | Maximum Power | 500 W/rotor |
| T-Style Propellers | |||
| Communications | Diameter x Pitch | 11 x 5.5 in | |
| Telemetry Frequency | 915 MHz | Material | Carbon Fiber |
| Radio Frequency | 2.4 GHz | ESC - Motor Speed Controller | |
| Transmission Distance | up to 5 km | Max. Cont. Current | 35 A |
| Burst Current | 45 A | ||
| GPS ACCURACY | Maximum Voltage | 14.8 V (4S LiPo) | |
| Horizontal (RTK) | within 3 cm | POWER | |
| Horizontal | within 1.5 m | Battery Type | 4S Smart LiPo |
| Vertical (RTK) | within 5 cm | Capacity | 5870 mAh |
| Vertical | within 3 m | Typical Endurance | 15 min |
| Meteorological Specifications | Flight Parameters | ||
|---|---|---|---|
| Thermodynamic | Maximum Tilt Angle | 40 degrees | |
| Primary variables | T, RH, P | Maximum Wind Resistance | 22 m/s |
| Derived Variables | Td, Tv, θ, θe, θω, r, rs, q, qs, e, es, LCL,Γ |
Maximum Operating Speed | 28 m/s |
| Accuracy | T: within .1 degree C RH: within 2% p: within 1.5 hPa |
Maximum Flight Ceiling | 6,000 ft AGL |
| Logging Rate | 10-20 Hz | Recommended Operating Temperatures | -20–40 deg C |
| Kinematic | Typical Ascent Rates | 1–5 m/s | |
| Primary variables | Tilt angles | Typical Descent Rates | 1–6 m/s |
| Derived Variables | Horizontal wind speed and direction | Weight (sans battery) | 1.5 kg |
| Accuracy | Speed: within .6 m/s Direction: within 4 degrees |
Average All-Up Weight | 2 kg |
| Logging Rate | 10-20 Hz | For more information regarding the CS or custom built solutions contact us! |